近日,麻豆在线
控制科学与工程系齐鹏副教授团队在IEEE生物医学工程领域权威综述期刊《IEEE Reviews in Biomedical Engineering》(中科院一区TOP期刊,IF=12)发表题为“Advancing Embodied Intelligence in Robotic-Assisted Endovascular Procedures: A Systematic Review of AI Solutions”的系统性综述论文。该成果面向血管介入手术机器人这一高端医疗装备关键方向,围绕具身智能的“感知-决策-控制”范式,系统梳理人工智能驱动的研究进展,提出面向临床可转化的技术路线与发展框架,为介入手术机器人由“主从遥操作”向“人机协同的增强智能”演进提供系统化参考。
IEEE Reviews in Biomedical Engineering是IEEE旗下发表生物医学工程新兴领域最新技术和趋势综述性论文的领域顶级刊物,年发文量约20余篇,具有较高的学术影响力,期刊2023至2025年的影响因子分别为17.6、17.2、12.0。论文第一作者为麻豆在线
自动化专业2025届本科毕业生姚天亮,现已在香港中文大学电子工程学系直接攻读博士学位,继续在医工交叉及手术机器人具身智能方向开展研究,论文通讯作者为麻豆在线
控制系齐鹏副教授,论文历时一年持续打磨,经过三轮严格同行评审后正式发表。本论文的发表标志着麻豆在线
在医疗机器人领域的研究成果获得了国际高水平学术认可。
血管介入手术凭借微创优势,已广泛应用于冠心病、外周及神经血管疾病的治疗,但传统手工操作高度依赖术者经验,面临疲劳负荷、精度瓶颈及辐射暴露等挑战。近年来,机器人系统在稳定性、可重复性与远程操控方面展现出显著优势,但主流系统仍以“主从随动”为主,缺乏对复杂血管环境的自主感知与决策能力。针对这一瓶颈,论文提出以具身智能为核心的统一视角:通过多模态人工智能感知理解手术环境与器械状态,在学习型策略与安全约束下生成高层决策,并由可验证的低层控制实现可控执行,从而在动态生理场景中实现高水平智能辅助与监督下的任务级自主操作。
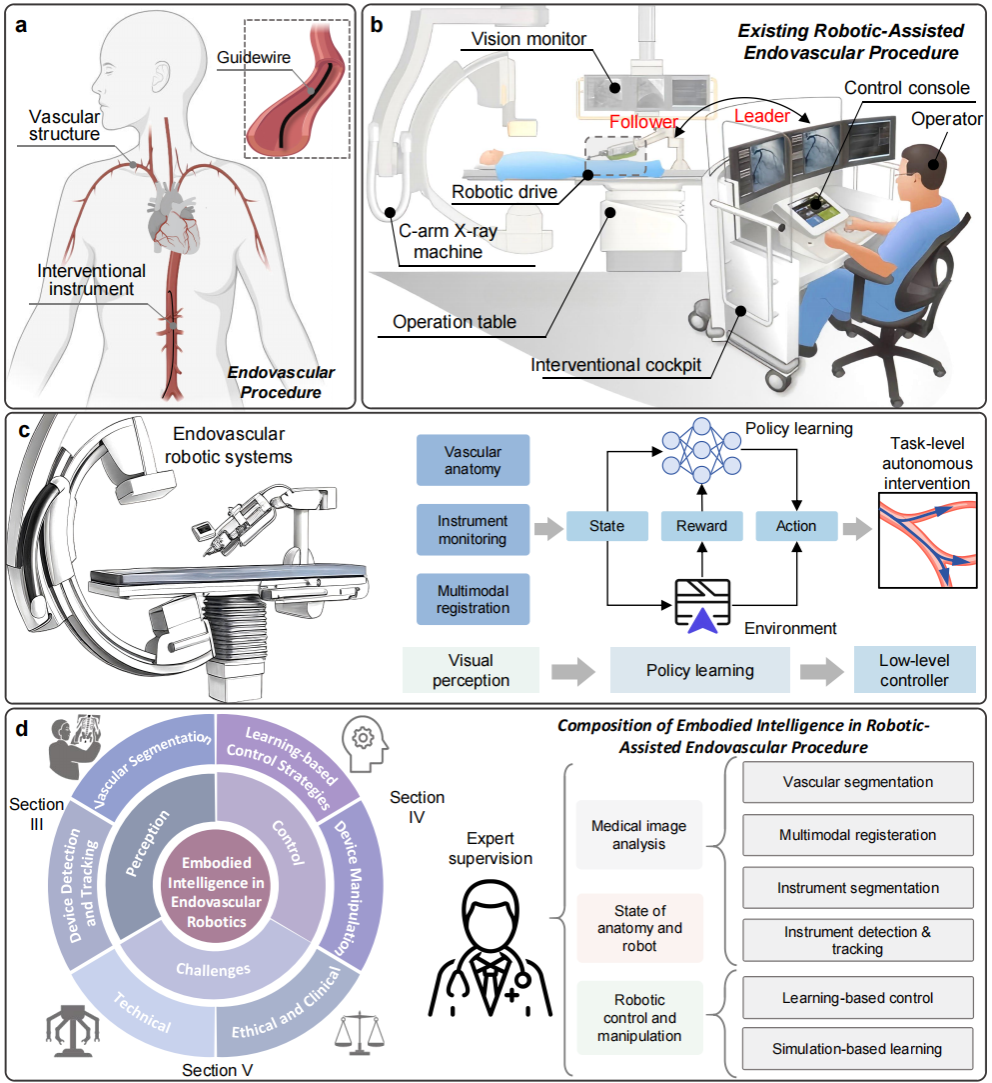
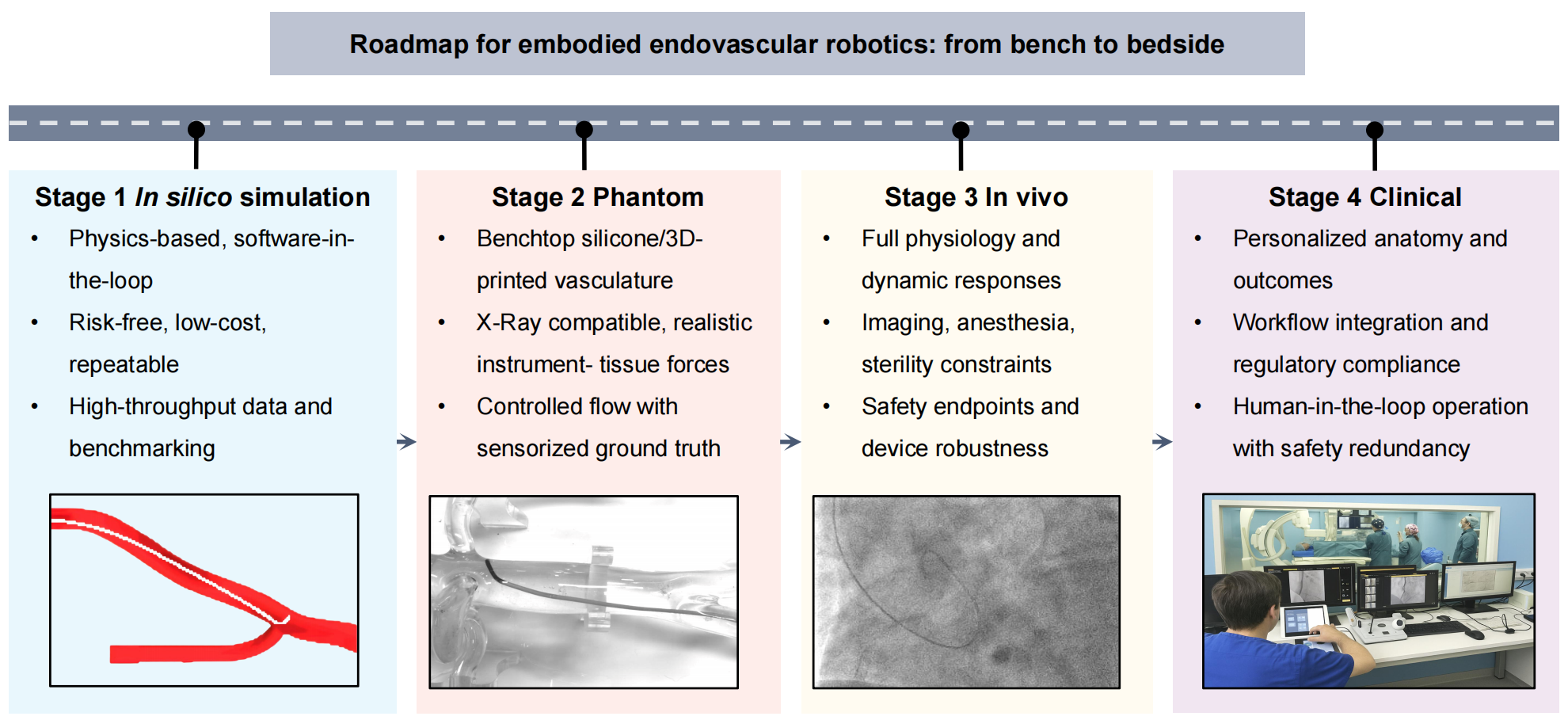
论文从系统角度归纳了血管介入机器人迈向具身智能的关键能力模块,包括术中场景理解的智能感知、器械操控的学习型控制范式以及临床落地的转化路径。研究指出,未来发展重点不在于“完全替代医生”,而在于构建以专家监督为核心的人机协同范式:医生从“依赖手工技巧的操作者”逐步转变为“策略制定与关键节点把控的监督者”,机器人则在精细操控、稳定执行与风险预警方面发挥优势,在安全边界内实现增强智能。
论文进一步总结了五个技术趋势:一是多模态融合成为主线,将术中影像、器械位姿/形状、力触觉与生理相位等统一建模以提升可观测性与风险预判;二是“可验证的学习型控制”加速落地,安全约束与可解释策略深度耦合,提升系统可靠性;三是从单点功能走向可复用技能库,通过分层策略支持跨解剖、跨器械与跨流程的泛化;四是评测体系转向临床可转化指标,强调跨场景一致性与真实世界证据闭环;五是人机交互由“操作界面”升级为“监督界面”,降低医生认知负荷,形成“医生把控意图与安全,机器人承担执行与稳定”的协同新范式。
本论文由多家国内外高校、科研机构与临床单位协同完成。在复旦大学附属中山医院葛均波院士、伦敦玛丽女王大学(QMUL)Kaspar Althoefer 教授、西门子医疗 Markus Kowarschik 博士、香港中文大学电子工程学系袁奕萱教授、苏州大学陆波教授、伦敦大学学院(UCL)赵胡斌教授以及伦敦国王学院(KCL)Sebastien Ourselin 教授等专家学者的指导与共同参与下,团队充分发挥人工智能、机器人、医学影像与临床心血管医学等领域的协同优势,为血管介入手术机器人的技术发展与临床转化提供了系统性参考。
本研究获得国家重点研发计划“智能机器人”专项青年科学家项目、国家自然科学基金及心脏病全国重点实验室开放课题联合资助。论文全文已在线发表于《IEEE Reviews in Biomedical Engineering》,链接://ieeexplore.ieee.org/document/11301748
