2026年6月5日,由学院举办的智信讲堂第91期在智信馆117报告厅开讲。本次讲堂特邀英国林肯大学Timothy Gordon教授作“Short-Horizon Predictive Steering Control within an Artificial-Flow-Guidance-Based Unified Co-Pilot Architecture”主题报告。
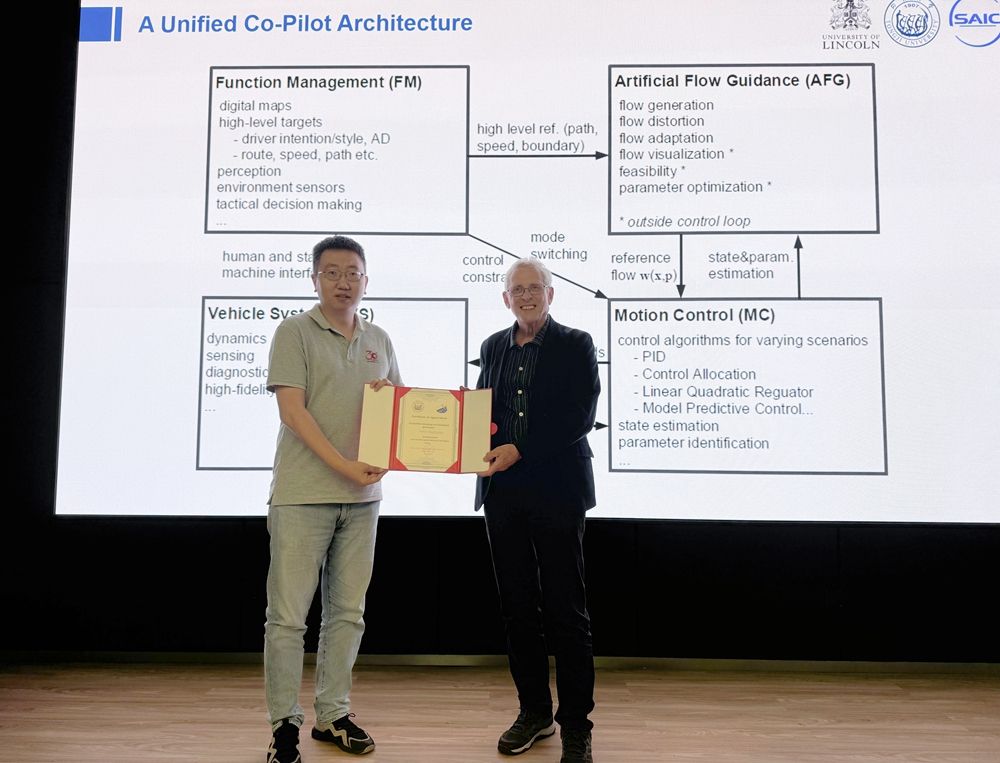
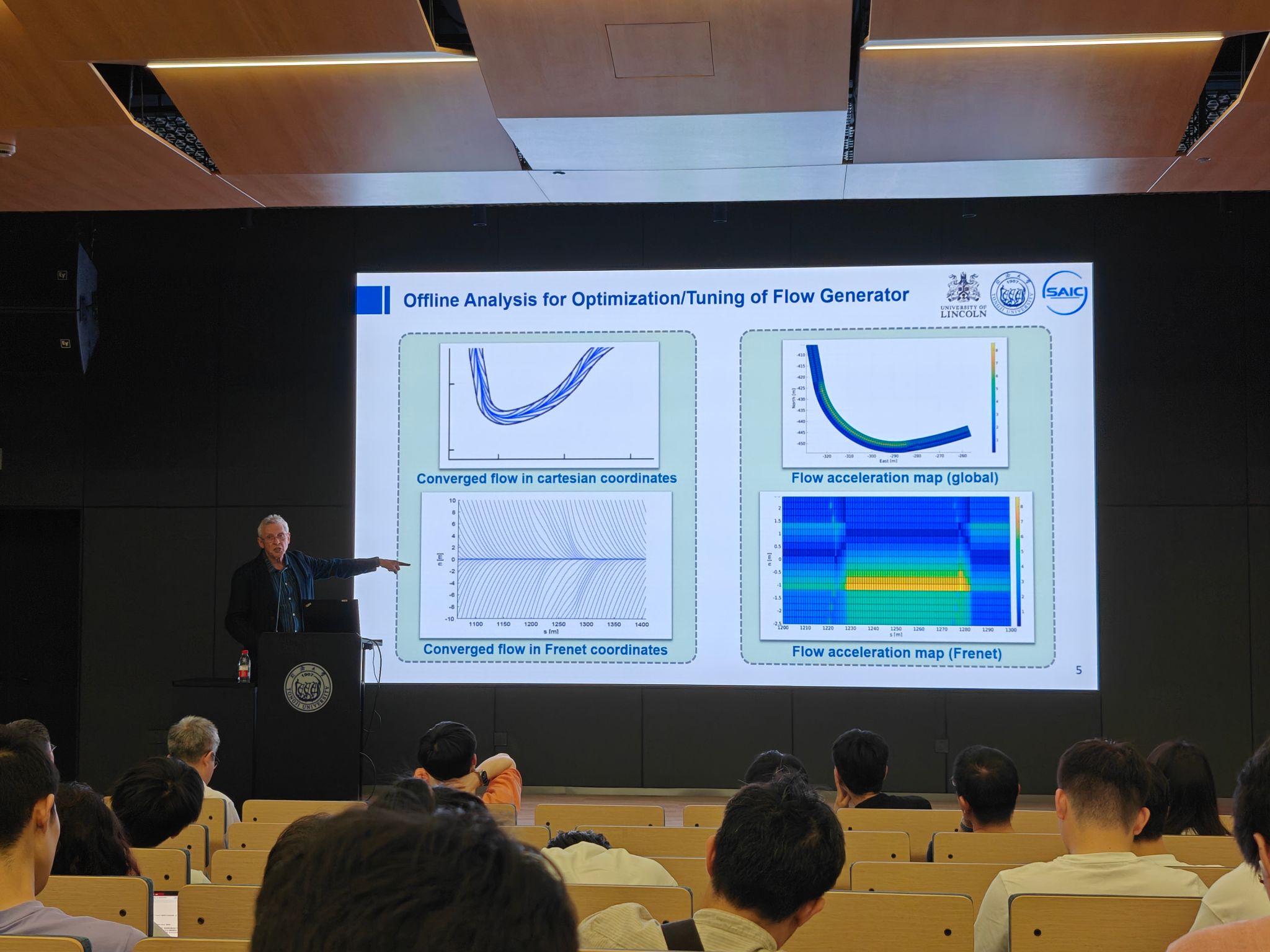
在本次报告中,Gordon教授围绕自动驾驶车辆动力学控制前沿问题,首先介绍了基于人工流场引导(Artificial Flow Guidance, AFG)的车辆动力学控制参考生成方法,随后系统阐述了以人工流场方法为核心的模块化、标准化、敏捷化自动驾驶动力学集成控制架构。面向自动驾驶丰富复杂的应用场景,Gordon教授提出了多模型、多参考、多算法协同设计的技术思路,为提升车辆运动控制系统的适应性、鲁棒性和可扩展性提供了新的研究视角。在工程实践层面,报告展示了AFG基础算法在不同典型工况下的应用效果,并进一步介绍了融合短时预瞄机制的AFG-MacAdam方法及其实车验证结果。

报告结束后,Gordon教授与在场师生就AI在车辆动力学控制领域的应用等问题进行了亲切交流和讨论。他结合自身经历,勉励同学们积极拓宽视野、勇于探索,发现并解决新的科学问题。此次报告进一步拓展了我校师生的学术视野,加深了对自动驾驶场景下的车辆动力学控制的理解和认识。